Бортовой радиолокатор для беспилотного воздушного судна
English
AIRBORNE RADAR FOR UNMANNED AIRCRAFT
Yuri S. Tsyplenkov, Limited Liability Company "SYNTHESIZER-NN", chief designer, Russia, Nizhny Novgorod, synthesprom@yandex.ru
ABSTRACT. In order to prevent collisions in conditions of the constantly increasing intensity of flights of aircraft of various types and purposes, it is proposed to develop a small-sized airborne radar station, compatible with the existing air traffic control system (ATC) and with the onboard systems of other aircraft to ensure flight safety.
Keywords: unmanned aerial vehicle, airborne radar, flight meteorological support, collision detection and avoidance system
В целях предупреждения их столкновений предлагается разработка малогабаритной бортовой радиолокационной станции, совместимой с существующей системой управления воздушным движением и бортовыми системами других воздушных судов для обеспечения безопасности полётов.
1. Постановка проблемы
Растущая интенсивность воздушного движения взывает к необходимости интеграции в общее воздушное пространство летательных аппаратов военного и гражданского назначения, что требует наличия бортовой аппаратуры, совместимой с существующей системой управления воздушным движением (УВД) и бортовыми системами других летательных аппаратов для обеспечения безопасности полётов.
Ограниченные возможности по размещению бортового оборудования на беспилотном воздушном судне (БВС), ближнемагистральных самолётах, самолётах местных линий, самолётах малой авиации требуют кардинальной оптимизации массогабаритных характеристик без снижения функциональных требований к системе предупреждения столкновений.
Анализ потребительских предпочтений в сегменте беспилотного транспорта показал, что масса бортового оборудования не может выходить за пределы 4‑5 кг [ 1 ]. С другой стороны, одним из важнейших функциональных требований является обеспечение разрешающей способности по координатам, от которой зависит качество обнаружения и распознавания воздушных судов, включая беспилотные. Таким образом, оптимальная система предупреждения столкновений в первом приближении должна иметь минимальные массогабаритные характеристики и высокую разрешающую способность.
При разработке малогабаритной системы предупреждения столкновений следует также учесть, что высокая интенсивность воздушного движения требует принятия мер к снижению нагрузки на системы вторичной радиолокации. Нагрузка возникает из-за большой концентрации активных радиотехнических средств, таких как ответчики режима S, установленные на летательных аппаратах [ 2 ], в относительно малых объёмах воздушного пространства, и, как следствие, снижается вероятность предотвращения конфликтов в воздухе.
Наращивание функционала канала 1090 МГц, используемого в системах вторичной радиолокации, в таких приложениях, как управление воздушным движением и предотвращение столкновений в воздухе, в настоящее время ограничено его пропускной способностью (1 Мбит/с). С использованием методов фазовой манипуляции сигналов на частоте 1090 МГц возможно увеличение пропускной способности в четыре раза при сохранении совместимости с ранее разработанными системами [ 3 ], но это не решает проблему безопасности воздушного движения и предотвращения столкновений.
В настоящее время созрели технические предпосылки для создания малогабаритной системы предупреждения столкновений воздушных судов военного и гражданского назначения в несегрегированном воздушном пространстве.
В настоящее время созрели технические предпосылки для создания малогабаритной системы предупреждения столкновений воздушных судов военного и гражданского назначения в несегрегированном (едином) воздушном пространстве. Внедрение систем предупреждения столкновений позволит:
- снизить количество авиационных происшествий из-за столкновений воздушных судов в воздухе на 95%;
- расширить эксплуатационные возможности воздушных судов гражданского и военного назначения с одновременным обеспечением требуемого уровня безопасности полётов;
- обеспечить интеграцию воздушных судов гражданского и военного назначения в несегрегированное воздушное пространство.
Предлагаемая радиолокационная станция может использоваться для мониторинга воздушной обстановки в условиях умеренных и сильных осадков, оценки метеообстановки по маршруту полёта, обнаружения местных предметов и объектов инфраструктуры, картографирования земной поверхности, выдачи целеуказаний на бортовую систему управления, а также на наземные пункты управления.
2. Предлагаемое решение
Задачу поиска оптимальной архитектуры системы предупреждения столкновений предлагается решить, используя минимаксный подход, в основе которого лежит гипотеза о наличии экстремумов, а также локальных максимума и минимума некоторой целевой функции.
Известен патент на изобретение RU2696274C1 от 01.08.2019 [ 4 ], отличительными особенностями которого являются упрощённая структура, низкие массогабаритные показатели и энергопотребление, малая мощность излучения и работа со сверхширокополосными ЛЧМ-сигналами в режиме непрерывного излучения.
Рассмотрим материалы данного патента в качестве прототипа при осуществлении структурного синтеза как одного из методов исследования, который будем применять в процессе системного поиска. Недостатком предложенного варианта построения радиолокатора с синтезированной апертурой (РСА) является наличие щелевой антенны и системы её механического вращения, что в разы увеличивает время сбора радиолокационной информации, которое является критичным в системах предупреждения столкновений.
По результатам структурно-параметрической оптимизации общего решения задачи синтеза [ 5 ] специалистами компании «СИНТЕЗАТОР-НН» получен вариант малогабаритного бортового радиолокатора с электронным сканированием луча в азимутальной и угломестной плоскостях, лишённый указанного недостатка. Радиолокатор позволит беспилотнику (а также любому воздушному судну, на который он будет установлен) заблаговременно получать оперативную информацию о плотности воздушного движения и своевременно менять курс, сохраняя жизнь сотням пассажиров.
Таким образом, решение проблемы безопасности воздушного движения и предотвращения столкновений беспилотных воздушных судов в несегрегированном воздушном пространстве станет более эффективным и прогнозируемым.
К настоящему моменту в инициативном порядке проведена работа по эскизному проектированию. Разработаны календарный план, дорожная карта и финансовая модель проекта, рассмотрены различные сценарии монетизации.
На первом этапе необходимо разработать и изготовить опытный образец малогабаритной бортовой радиолокационной станции (РЛС) для беспилотного воздушного судна, предназначенный для некооперативного обнаружения воздушных объектов (включая беспилотные), их сопровождения, измерения их координат, оценки метеообстановки по маршруту полёта, обнаружения местных предметов и объектов инфраструктуры, картографирования земной поверхности, выдачи целеуказаний на бортовую систему управления БВС, а также на наземные пункты управления (НПУ). Мониторинг воздушной обстановки должен осуществляться в простых и сложных метеоусловиях, в условиях умеренных и сильных осадков (до 4 мм/ч).
На втором этапе мы планируем приступить к освоению опытного производства и отработке первой партии изделий в количестве 10 штук, пройти сертификацию на соответствие требованиям Международной организации гражданской авиации (ИКАО, англ. ICAO – International Civil Aviation Organization) с целью дальнейшего серийного производства на территории Нижегородской области.
Бортовую РЛС предлагается выполнить в Кu-диапазоне. РЛС будет состоять из трёх радиолокационных модулей (РЛМ): курсового модуля и двух бортовых (рис. 1). С целью устранения проблемы перекрёстных помех каждый из модулей работает на своей частотной рабочей точке. Для РЛМ, смотрящего по курсу следования БВС, антенная решётка (АР) может иметь больший размер, чем для бортовых РЛМ, что позволяет обеспечить лучшее разрешение по угловым координатам.
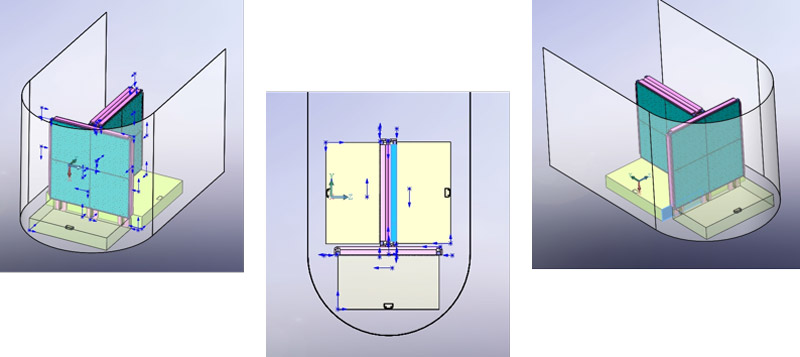
Рис. 1. Бортовая РЛС БВС. Вариант размещения на малогабаритном БВС
При умеренно-пессимистическом сценарии выручка от реализации серийной продукции к 2025 году составит свыше 214 млн руб. в год, что позволит создать 10 высокопроизводительных рабочих мест, ежегодные налоговые отчисления в бюджет Нижегородской области составят около 17 млн руб. в год.
3. Построение радиолокационного модуля
Радиолокационный модуль состоит из отражательной фазированной антенной решётки (ФАР) и аппаратного блока (рис. 2). Для обеспечения ширины луча менее 6° размер ФАР не должен быть менее 250 мм. Габаритные размеры ФАР будут определяться исходя из конструктивных ограничений БВС. С целью минимизации потерь в фидерных трактах и минимизации массогабаритных характеристик радиолокационного модуля в целом все узлы интегрированы в один моноблок. Это позволяет минимизировать длину связей между узлами и сэкономить массу на корпусах. Облучатели ФАР также интегрированы в моноблок, что позволяет избежать кабельных соединений (в данном диапазоне потери в фидерах существенны). Аппаратный блок позиционируется ловителями и жёстко крепится к фрезерованной раме ФАР. Это позволяет избежать расфокусировки ФАР в ходе установки РЛМ на БВС. Минимальный угол сканирования по углу места составляет 30°, но может быть увеличен. Угол определяется исходя из функциональной целесообразности.
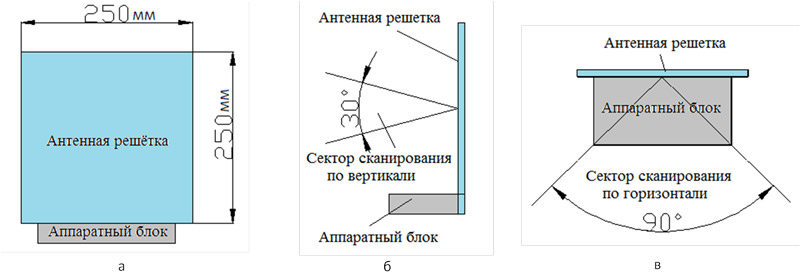
Рис. 2. Эскиз радиолокационного модуля малогабаритной РЛС БВС (виды: а - спереди, б - сбоку, в - сверху)
Аппаратный блок предназначен для формирования опорных, гетеродинных и несущих частот, синхросигналов и зондирующих сигналов, усиления сигналов в полосе рабочих частот и передачи мощности в антенну, приёма, фильтрации и усиления отражённых от цели сигналов, преобразования их на промежуточную частоту, обеспечения основной частотной избирательности и защиты от побочных каналов приёма, цифро-аналогового преобразования, первичной цифровой обработки (цифровой фильтрации, децимации и т.д.), кодирования и передачи по цифровым каналам в вычислитель для последующей вторичной обработки сигналов.
Результат вторичной обработки эхосигналов передаётся в систему управления воздушным судном, а также в закодированном формате по существующим на борту каналам связи на наземные пункты управления для осуществления третичной, по необходимости, обработки сигнала с использованием более мощных вычислителей и оперативным отображением данных о воздушной обстановке на удалённых терминалах.
4. Новизна проводимых работ
Новизна проводимых работ заключается:
- в разработке новых принципов построения малогабаритного бортового радиолокатора для беспилотного воздушного судна;
- в разработке новых алгоритмов функционирования БВС в сложных условиях эксплуатации (неблагоприятные метеоусловия, непредсказуемое поведение других БВС, наличие городской инфраструктуры);
- в предсказании тактико-технических характеристик малогабаритной бортовой РЛС БВС на основе результатов имитационного моделирования и алгоритмов функционирования по различным сценариям.
5. Конкурентные преимущества
Конкурентные преимущества предлагаемого решения состоят в высокой скорости обработки радиолокационной информации (в 36 раз быстрее систем с щелевыми антеннами), минимизации веса (до 3,2 кг), экономичном энергопотреблении (не более 70 Вт) и разумной стоимости серийного изделия (на 28% дешевле аналогов).
Литература
- Кузнецов В. А., Гончаров С. А. Структурно-параметрический синтез малогабаритной радиолокационной станции с синтезированной апертурой беспилотного летательного аппарата ближнего действия // Системы управления, связи и безопасности. 2017. № 3. С. 28-72.
- Давыдов П. С., Сосновский А. А., Хаймович И. А. Авиационная радиолокация. Справочник. М.: Транспорт, 1984. 223 с.
- ICAO. Annex 10. Volume IV – Surveillance Radar and Collision Avoidance System.
- Патент № 2696274C1 РФ. Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолётных систем / Канащенков А. И., Ельтищев А. К., Матвеев А. М. Опубл. 01.08.2019. Бюл. № 22.
- Воинов Б. С., Бугров В. Н., Воинов Б. Б. Информационные технологии и системы: поиск оптимальных, оригинальных и рациональных решений. Второе дополненное научное электронное издание. В 2 томах. Том I. Методология синтеза новых решений. М.: Наука, 2007. 480 c.
References
- Kuznetsov V. A., Goncharov S. A. Strukturno-parametricheskiy sintez malogabaritnoy radiolokatsionnoy stantsii s sintezirovannoy aperturoy bespilotnogo letatel'nogo apparata blizhnego deystviya. Sistemy upravleniya, svyazi i bezopasnosti, 2017, no. 3, pp. 28-72.
- Davydov P. S., Sosnovskiy A. A., Khaymovich I. A. Aviatsionnaya radiolokatsiya. Moscow: Transport, 1984. 223 p.
- ICAO Annex 10 Volume IV – Surveillance Radar and Collision Avoidance System.
- Kanashchenkov A. I., El'tishchev A. K., Matveev A. M. Malogabaritnaya mnogorezhimnaya bortovaya radiolokatsionnaya sistema dlya osnashcheniya perspektivnykh bespilotnykh i vertoletnykh system. Pat. RF no. 2696274C1 (2019).
- Voinov B. S., Bugrov V. N., Voinov B. B. Informatsionnye tekhnologii i sistemy: poisk optimal'nykh, original'nykh i ratsional'nykh resheniy. Vol. 1. Metodologiya sinteza novykh resheniy. Moscow, Nauka, 2007. 480 p.
© Цыпленков Ю. С., 2020
История статьи:
Поступила в редакцию: 23.10.2020
Принята к публикации: 18.11.2020
Модератор: Плетнер К. В.
Конфликт интересов: отсутствует
Для цитирования: Цыпленков Ю. С. Бортовой радиолокатор для беспилотного воздушного судна // Воздушно-космическая сфера. 2020. № 4. С. 52-57.
Скачать статью в формате PDF >>
 5205
5205