Обретение Beagle 2
Британский аппарат для посадки на Марс Beagle 2, считавшийся пропавшим без вести в 2003 году, был обнаружен частично развёрнутым на поверхности планеты. 16 января 2015 года был объявлен конец загадочной истории, случившейся с Beagle 2, когда после контакта с поверхностью планеты он исчез.
Майкл Крун из Трира ( Германия), бывший сотрудник оперативной команды Mars Express Европейского космического агентства (ЕКА) в Европейском центре космических операций (ESOC), первым проанализировал изображения, полученные с помощью камеры HiRISE, установленной на борту марсианского исследовательского зонда (MRO) НАСА. И Майкл, и другие исследователи теперь имеют наглядные свидетельства посадки модуля и убедительные доказательства нахождения основных компонентов его захода и спуска на поверхности Марса в пределах ожидаемой области посадки на низкой равнине Исида (Isidis) на поверхности планеты, недалеко от экватора.
Технический перевод статьи журнала ROOM, № 2(4) 2015
Эта находка доказывает, что Beagle 2 благополучно выполнил последовательность операций: вход в атмосферу, снижение и посадку (EDL); после чего спускаемый аппарат действительно успешно приземлился на Марсе на праздник Рождества 2003 года. Beagle 2 стал плодом совместных усилий в области промышленности и науки и добрался на Марс на космическом летательном аппарате ЕКА Mars Express. С поверхности Красной планеты могли быть доставлены знания мирового класса.
Свой вклад в создание Beagle 2 внесли многочисленные научно-исследовательские группы и промышленные компании Великобритании.
.jpg)
.jpg) |
|
Профессор Марк Симс (Mark Sims), руководитель миссии Beagle 2 |
.jpg) |
|
Д-р Джим Клеммет (Jim Clemmet), главный инженер миссии Beagle 2 |
.jpg) |
|
Профессор Джон Бриджес (John Bridges), естествовед планеты Марс в проекте Beagle 2
|
Красная планета ждёт
Полёт посадочного модуля Beagle 2 был частью программы ЕКА, в соответствии с которой в июне 2003 года был запущен космический летательный аппарат Mars Express. Mars Express до сих пор находится на орбите Марса и передаёт научно-исследовательские данные о планете. Beagle 2 успешно катапультировался с корабля Mars Express Европейского космического агентства 19 декабря 2003 года – спустя 5,75 дней после запуска двигателя и вывода на орбиту Mars Express.
Со дня исчезновения Beagle 2 Майкл Крун и другие члены производственных и научно-исследовательских групп проводили тщательный скрининг изображений, снятых камерой HiRISE, установленной на борту марсианского исследовательского зонда (MRO) НАСА. Камера HiRISE иногда делала случайные фотографии участка посадки, помимо выполнения своих научных исследований поверхности Марса. На момент запуска Beagle 2 планируемая зона посадки составляла примерно 170x100 км на равнине Исида. Полностью развёрнутый Beagle 2 находился на расстоянии менее чем нескольких метров по ту сторону при разрешении камеры около 25 см, поэтому обнаружить его было очень сложной и кропотливой задачей.
Первые признаки находки модуля были замечены на снимках HiRISE, сделанных 28 февраля 2013 года и 29 июня 2014 года. Последующие повторные изображения и анализ, проведённый командой Beagle 2, командой HiRISE и Лабораторией реактивных двигателей (JPL) НАСА, подтвердили, что обнаруженный объект поисков имеет соответствующий размер, форму, цвет и дисперсии (то есть разделения), чтобы быть Beagle 2.
На изображении просматривается спускаемый аппарат Beagle 2 с частично развёрнутой конфигурацией, а также с тем, что, как полагают, является задней панелью со вспомогательным (тормозным) парашютом, который всё ещё прикреплён как положено, и основным парашютом, находящимся рядом. Местонахождение лобового теплозащитного экрана и воздушного амортизатора ещё предстоит определить. Объекты поиска находятся в пределах расчётной посадочной площадки на расстоянии около 5 км от её центра.
Выполнено несколько интерпретаций изображений посадочного модуля в соответствии с размером посадочного модуля и формой. Информация об изображении, однако, соответствует только частичному развёртыванию после посадки. Такое положение объясняет, почему не было получено какого-либо сигнала или данных от посадочного модуля, поскольку только полное развёртывание всех солнечных панелей обеспечивало экспонирование антенны РЧ, которая будет передавать данные и получать команды с Земли с помощью марсианских орбитальных космических кораблей, таких как Mars Express ЕКА, Odyssey НАСА или марсианского исследовательского зонда (MRO) НАСА.
К сожалению, учитывая частичное развёртывание, и, как результат, отсутствие покрытия антенны РЧ, оживить Beagle 2 и восстановить данные с него невозможно.
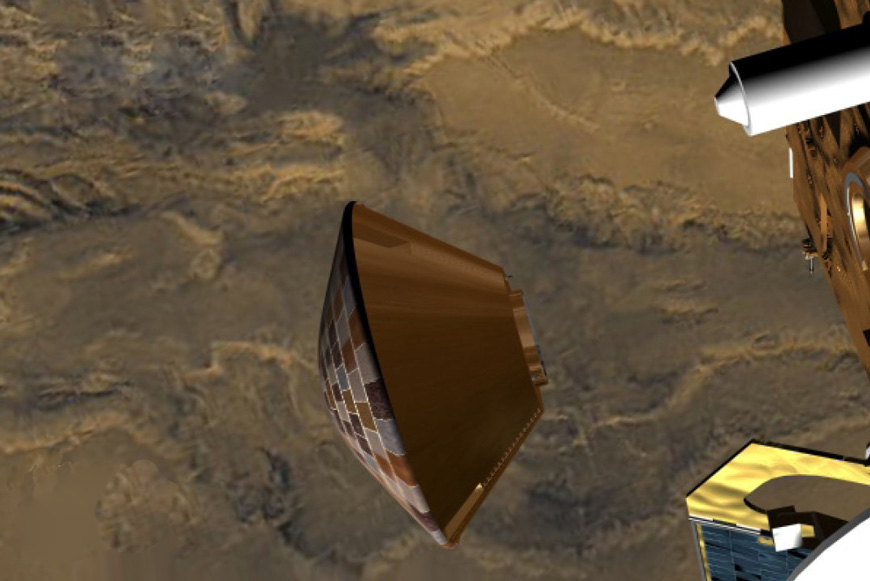
Вход в атмосферу, снижение и посадка
Посадочный модуль Beagle 2 (93 сантиметра в диаметре) был установлен на «верхней палубе» космического корабля Mars Express (MEх). После регулярных системных проверок в течение семи месяцев этапа крейсерского полёта к Марсу 19 декабря 2003 года Beagle 2 отделился от MЕx на стабилизирующей скорости вращения – 11 оборотов в минуту. Чуть меньше, чем через 6 дней после ухода с MEх, и за 2,5 часа до достижения верхнего слоя атмосферы Марса Beagle 2 автоматически активизировался в полночь первого дня Рождества, чтобы начать порядок выполнения входа в атмосферу, спуска и посадки. Этот порядок состоит из 33 отдельных задач и функций, каждая из которых не имела альтернативных возможностей, за исключением акселерометров зондирования.
Интервал от входа в атмосферу на скорости 20 000 км/ч до первого столкновения с поверхностью на скорости 16 м/с составил немногим меньше 8 минут. В течение этого времени комбинация атмосферного торможения замедлила движение Beagle 2, программное обеспечение зонда контролировало тормозной (1,9 м) и основной (10 м) парашюты. Космический корабль отбросило при заминке, но воздушный амортизатор, шириной 2 м, смягчил удар. После того как Beagle 2 стал неподвижен, программное обеспечение дало команду 3-м сегментам воздушного амортизатора отделиться, позволив спускаемому аппарату упасть на поверхность. Общая ударная нагрузка на Beagle 2 составила 400 г. Наконец, перед тем как переключиться на программное обеспечение наземных операций, чтобы продолжить этап развёртывания, зонд выпустил замковую ленту посадочного устройства.
Наземные операции
Первоначальной задачей программного обеспечения посадочного модуля было открытие двустворчатой конструкции: поднять крышку или тяжёлую базу, в зависимости от того, что важнее после хаотичной посадки. Стоит лишь открыть – сразу высвобождается блок из 4 солнечных панелей, удерживаемых крышкой. Все 5 прижимных устройств должны были функционировать соответствующим образом, чтобы развернуть панель. Под управлением программного обеспечения каждая панель должна была в свою очередь развернуться с помощью серии условий углового текущего контроля пороговых значений. Если какая-либо панель не соответствовала изначальному минимальному требованию в 130°, команда поступала следующей панели после истечения срока ожидания. Для адекватного функционирования в крышку была вмонтирована антенна УВЧ с условием успешного развёртывания всех солнечных панелей.
Солнечные элементы, покрывающие 85% фронтальной поверхности каждой солнечной панели, обеспечивали высокую отражающую способность. Задняя поверхность панелей и экспонируемая поверхность крышки изготовлены из композиционного материала – углеродного волокна с отражающей поверхностью, обогащённой смолой. Диаметр платформы посадочного модуля – 66 см и 59 см – диаметр солнечных панелей соответственно, на изображениях HiRISE ширина составляет приблизительно всего лишь 2 пикселя.
.jpg)
.jpg)
.jpg)
Что пошло не так?
На основании всего увиденного к настоящему времени на снимках можно говорить о том, что система входа в атмосферу, снижения и посадки Beagle 2 стала инженерной удачей с точки зрения как аппаратного, так и программного обеспечения, но это не стало фактором, способствовавшим падению. Операции на поверхности были чётко активированы и удачно инициировано разворачивание, что подтвердило, по крайней мере, функционирование одной из солнечных панелей, раскрытой соответствующим образом. Такое частичное развёртывание солнечных панелей демонстрирует допустимую работу программного обеспечения посадочного модуля.
То есть среди причин, из-за которых не произошло полного раскрытия этих панелей, можно назвать следующие: закупорка частью сегмента воздушного амортизатора, оставшегося в непосредственной близости от посадочного модуля, возможно, из-за механического зависания или чрезмерной утечки газа; повреждение механизма или структуры, либо нарушение электрического соединения в результате, возможно, больших, чем ожидалось, ударных нагрузок при посадке. Сценарий с привлечением местного ландшафта, включая большие куски горной породы, которые могли блокировать развёртывание, считается маловероятным, учитывая, что на изображениях с места посадки присутствует всего лишь несколько глыб. Тем не менее и этот фактор тоже нельзя исключать. Наклон и высота, полученные с изображений камеры HiRISE университета Аберистуита, показывают, что Beagle 2 приземлился на относительно ровной местности без каких-либо серьёзных рисков.
Проводится дальнейший анализ изображений, который обещает сузить количество этих вариантов, но, конечно же, мы, возможно, никогда полностью не определим реальную причину потери Beagle 2.
Наследие Beagle 2
Тем не менее, согласно ставшим доступными теперь свидетельствам, события, имевшие место на Рождество 2003 года, знаменуют собой первую и успешную высадку Великобритании и Европы на другое тело в Солнечной системе.
Проект Beagle 2 и его конструкция, после потери, привлекают критику со стороны некоторого круга лиц; но это открытие подтверждает, что малые посадочные модули способны осуществлять посадку на Марсе, хотя некоторые изменения должны быть внесены в любую подобную конструкцию, чтобы преодолеть некоторые из потенциальных проблем, возникающих с такими компактными спускаемыми аппаратами. С момента потери Beagle 2 ЕКА выставило условие, согласно которому посадочные модули должны поддерживать радиосвязь с космическим кораблём, находящимся на орбите во время фазы спуска: это та связь, которая была недоступна для проекта Beagle 2. Система связи EDL (на входе, снижении и приземлении) рассматривалась для Beagle 2, но вокруг Марса не было орбитального летательного аппарата, способного получить сигнал для передачи по прямой линии на Землю.
Профессор Колин Пиллингер из Открытого университета, чьё видение и вдохновляющий энтузиазм питали и направляли проект Beagle 2 в нужное русло, к сожалению, умер в мае 2014, прежде чем Beagle 2 был найден на Марсе. Другие его соратники, внёсшие значительный вклад в создание Beagle 2, – это профессор Джордж Фрейзер из Университета Лестера и профессор Дэвид Барнс из Университета Абериствит, который, к сожалению, тоже ушёл от нас в 2014 году. Успех Beagle 2 не был бы возможен без них.
Один из нас – профессор Марк Симз из Университета Лестера – человек, который был неотъемлемой частью проекта Beagle 2, возглавил самую начальную фазу исследований, был руководителем миссии Beagle 2 и также возглавил команду полётных операций, во время официального обращения сообщил прессе, что он несомненно рад, что Beagle 2, наконец, был найден на Марсе. Каждое Рождество, начиная с того Рождества 2003 года, ему не давал покоя вопрос: что же случилось с Beagle 2? В 2003 году его Рождество, как и Рождество многих других, кто работал над проектом, было опечалено утратой надежды на то, что с поверхности Марса придут вести.
Более того, как и многие другие, он не отказался от надежды когда-нибудь узнать, что же случилось с Beagle 2. Эти снимки показывают, что вся команда приблизилась к достижению своей научной цели на Марсе. Эти снимки оправдывают тяжёлый труд, вложенный большим количеством людей и компаний, как в Великобритании, так и по всей Европе и в мире, в создание Beagle 2.
Проект Beagle 2 вдохновил множество людей среди широкой общественности и косвенно привёл Великобританию к тому, что она становится ведущим участником программы Aurora ЕКА и миссии ExoMars ЕКА. Великобритания ведёт проектирование и строительство вездехода Rover для космического полёта ExoMars 2018 в компании Airbus: оборона и космические исследования, Стивенэйдж. Марсоход будет исследовать Марс путём бурения глубиной до 2 метров под землёй, исследуя геохимию и минералогию Марса и будет вести поиск потенциальных доказательств прошлой жизни. Недавние открытия вездеходом НАСА Curiosity жилых сред на Марсе – в далёком прошлом крупных озёр и спорадических выпусков метана – значительно увеличили шансы найти доказательства того, что жизнь в виде микроорганизмов, возможно, была и может всё-таки существует на Марсе.
Понятно, что научные цели, поставленные профессором Пиллингером для Beagle 2, остаются в силе и сегодня. Находка почти полностью развёрнутого Beagle 2 показала, что небольшие, низко затратные статические посадочные модули с высокой научной отдачей способны достичь этих целей, могут успешно вывести нас на поверхность Марса. Уроки были извлечены из этой первой попытки.
.jpg)
Информация о команде Beagle 2
Beagle 2 был первым британским космическим полётом на другую планету. Проект представлял из себя партнёрство между Открытым университетом, Университетом Лестер и EADS Astrium (Великобритания) (в настоящее время – Airbus Defence and Space). Другими партнёрами-инвесторами являлись: Европейское космическое агентство (ЕКА), Управление по науке и технике Министерства торговли и промышленности, Научно-исследовательский совет по физике элементарных частиц и астрономии (PPARC), трастовая компания Wellcome Trust, Национальный космический центр и Комиссия по проблемам тысячелетия.
Информация о HiRISE и MRO – марсианском исследовательском зонде
HiRISE (камера с формированием изображения с высоким разрешением) эксплуатируется Университетом Аризоны, Тусон. Прибор был построен компанией Ball Aerospace & Technologies Corp., Боулдер, штат Колорадо. Проект марсианского исследовательского зонда находится под управлением Дирекции научных миссий НАСА в Вашингтоне, Лаборатории реактивного движения НАСА в Пасадена, Калифорния, подразделения Калифорнийского технологического института, также в Пасадене.
Веб-сайты и прочая информация
http://www2.le.ac.uk/news/blog/2015-archive-1/january/beagle-2-lander-found-on-mars
https://www.gov.uk/government/organisations/uk-space-agency
Предпосылки и выражение признательности
Данная статья состоит из соответствующих выдержек из Информационного бюллетеня, опубликованного для медийного события, посвящённого миссии Beagle 2 и состоявшегося в Королевском обществе в Лондоне 16 января, и содержит дополнительный текст. Первоисточник принадлежит Университету Лейсетер, команде проекта Beagle 2 и Космическому агентству Великобритании при участии команд НАСА MRO и HiRISE. Профессор Марк Симс и Джон Бриджес работают в Университете Лейсетер, в то время как д-р Джим Клеммет вышел на пенсию.
Наложение изображение Beagle 2 было получено при содействии Пьял-Самара-Ратна, а изображения Beagle 2 с камеры HiRISE были получены при содействии Стюарта Тернера, студента физического факультета Центра космических исследований, кафедра физики и астрономии Университета Лестера Le1 7RH, Великобритания.
Технический перевод статьи журнала ROOM
Оригинал статьи можно прочитать по этой ссылке
Beagle 2: discovering the lost Mars lander
журнал «ROOM» № 2(4) 2015

 5234
5234